

In tutti i settori industriali, i produttori e i loro fornitori di servizi di magazzino cercano costantemente l’ottimizzazione dei processi per affrontare sfide come la carenza di manodopera, l’aumento della concorrenza e la necessità di una produzione agile come anche riuscire ad effettuare consegne rapide. Gli AMR (Autonomous Mobile Robots) sono diventati in pochi anni un mezzo efficiente per automatizzare le attività di trasporto interno per le aziende in tutto il mondo. Man mano che gli AMR si sono affermati come tecnologia innovativa, i produttori, i magazzini e le strutture di distribuzione hanno esigenze sempre più sofisticate con l’aumento di richiesta di supporti automatizzati specificatamente progettati per la movimentazione: dagli AMR generici ai carrelli elevatori e ai carrelli ad alta portata, fino ai veicoli a guida automatica (AGV) per ricevere, immagazzinare, spostare e spedire gli articoli in modo più rapido e preciso.
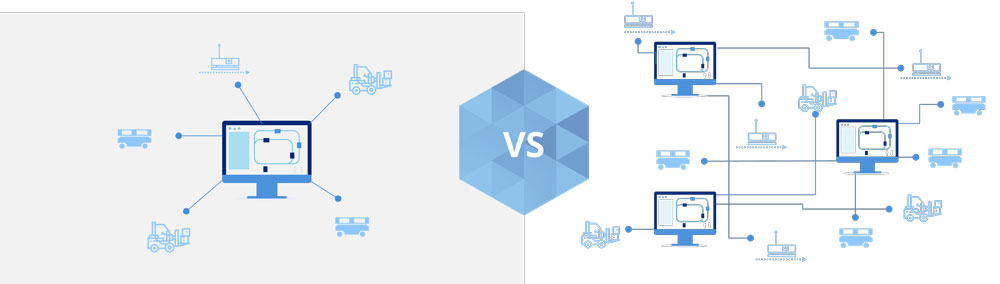
Con la crescente tendenza all’automazione e l’implementazione di diversi AMR e altri veicoli automatizzati, si vengono a creare situazioni di traffico più complesse da gestire. Molto spesso i sistemi logistici provengano da fornitori diversi, con standard operativi differenti e sistemi di controllo separati e questa complessità non è ideale per l’utente finale che cerca facilità d’uso e un unico meccanismo di controllo e supporto per l’intera flotta di AMR e veicoli automatizzati.
L’interoperabilità è quindi un argomento molto importante e interessante da approfondire, pertanto abbiamo raccolto cinque domande che i nostri clienti pongono più spesso: vediamole insieme.
Che cos’è l’interoperabilità per gli AMR?
La prassi attuale vede ogni fornitore di AMR utilizzare il proprio software di gestione della flotta, il che rende difficile per gli utenti finali gestire in modo efficiente una flotta di AMR e AGV di marche diverse. In parole povere, l’interoperabilità è la capacità di un sistema di gestione centrale di comunicare e coordinarsi con l’hardware della flotta di diversi fornitori in un’unica fonte di controllo e in un’unica interfaccia, riducendo così gli ostacoli che rappresentano un freno all’ulteriore adozione degli AMR.
Quali sono le principali sfide dell’interoperabilità AMR?
L’interoperabilità ha molto senso dal punto di vista iniziale del cliente: perché essere legati a un singolo fornitore se il mercato può essere mercificato? Tuttavia, anche se la base per gli standard di interoperabilità è stata stabilita oggi (come MassRobotics e VDA 5050), c’è ancora molta strada da fare per sfruttare appieno i vantaggi che essa offre.
L’interoperabilità implica alcune sfide commerciali. La proprietà delle prestazioni del sistema è una zona grigia: è il fornitore della gestione flotte di terze parti a essere responsabile dei malfunzionamenti del sistema o sono i produttori di robot, anche se non hanno progettato il sw di flotte, ma forniscono comunque i dati? Oppure è l’interfaccia che si collega al sistema ERP/WMS del cliente finale ad essere il problema? Questo aspetto è ancora da definire.
Da un punto di vista tecnico, ogni fornitore ha tipicamente due tipi di software: il software del robot che controlla la pianificazione basata sul robot stesso e il software che gestisce la pianificazione della flotta (per saperne di più su come funziona il software di MiR, leggete qui ) e non è chiaro come gestire mappe e configurazioni diverse da fornitori differenti in un sistema di terze parti. Inoltre, la qualità dei dati dei sistemi di gestione delle flotte non è standardizzata e quindi può essere difficile individuare quali dati possono essere scambiati tra due sistemi AMR.
Che cosa sono il VDA 5050 e la MassRobotics?
VDA 5050 è un’interfaccia standardizzata progettata per comunicare tra diversi AGV, potenzialmente di fornitori diversi, e un sistema di controllo ed è lo standard europeo per l’interoperabilità di AGV e AMR. Questo standard descrive le interfacce e i protocolli tra il livello di controllo e gli AGV. Gli AMR possono rientrare in questo standard a patto di rinunciare a una parte della loro autonomia.
Come intuibile, l’obiettivo di questo standard è quello di consentire ad AGV e robot mobili conformi di lavorare insieme utilizzando in comune un software di gestione della flotta. Il VDA 5050 descrive la comunicazione tra due entità: l’AGV e il sw della flotta, e pertanto il VDA 5050 dovrà essere implementata a entrambi i margini del canale di comunicazione per poter funzionare correttamente. L’intenzione del VDA 5050 è quella di controllare il processo a basso livello, in contrasto con la possibilità di avere diversi fornitori di soluzioni per flotte che potrebbero coesistere e interoperare in fabbrica.
Il VDA 5050 è stato sviluppato da una collaborazione tra l’Associazione Tedesca dell’Industria automobilistica (VDA) e l’Associazione per la Movimentazione dei Materiali e l’Intralogistica VDMA. Anche se al momento è promosso dalle associazioni industriali tedesche, sarà presto utilizzato in tutta Europa e probabilmente anche in altre regioni.
MassRobotics è il più grande centro indipendente di innovazione robotica senza scopo di lucro che rappresenta il concetto americano dello standard di interoperabilità. La missione del gruppo è quella di sviluppare standard che consentano di predisporre AMR e altre apparecchiature di automazione provenienti da diversi fornitori e di farli lavorare insieme nello stesso ambiente. Questo standard consentirà a robot di diverso tipo la condivisione di informazioni sullo stato e schemi operativi in modo da poter coesistere in modo efficiente.
Sia il VDA 5050 che MassRobotics sono nella fase iniziale poiché le versioni attuali si limitano alle funzionalità di base, come ad esempio la comunicazione dei comandi agli AMR/AGV e l’invio di compiti. Non sono ancora coperti gli altri numerosi fattori che devono essere gestiti per garantire il successo di un’installazione multi-robot.
I sistemi di gestione della flotta di terze parti rendono ridondanti i software e i sistemi di gestione della flotta specifici per il fornitore?
L’interoperabilità porta molti vantaggi e, a un certo punto, vedremo sistemi di gestione della flotta di terze parti che potranno occuparsi della pianificazione del traffico e di alcuni scambi di dati. Tuttavia, il percorso verso questo traguardo non è agevole e siamo ancora in una fase iniziale. Gli standard sono ancora in fase di sperimentazione e nessun sistema di gestione flotte di terze parti è in grado di fornire le stesse opzioni di gestione della flotta e gli stessi dati di quello del fornitore: il MiR Fleet, ad esempio. Come già accennato, dovremo affrontare molte sfide sia commerciali che tecniche quindi, il software del robot e il software di gestione della flotta specifici del fornitore sono ancora indispensabili per garantire le prestazioni degli AMR, e lo saranno per gli anni a venire.
In un futuro prossimo, sarà più realistico vedere una coesistenza tra i sistemi, con i produttori di AMR che renderanno nativa l’interoperabilità nei loro sistemi. In questo modo i robot potranno essere integrati in un sistema di gestione della flotta di terze parti o funzionare come sistemi di gestione di terze parti che gestiscono il controllo generale del traffico da diversi AMR e altri veicoli automatizzati. Per le funzioni avanzate, la raccolta dei dati, la manutenzione predittiva, gli sviluppi, ecc. il software all’avanguardia del produttore di AMR è ancora la chiave per un’integrazione di successo.
Qual è l’opinione di MiR sull’interoperabilità?
In quanto organizzazione orientata al cliente, riconosciamo pienamente la necessità di interoperabilità tra diversi AMR e AGV per una gestione efficiente del traffico tra i vari brand. Per questo motivo, in MiR abbiamo un team dedicato all’interoperabilità, siamo coinvolti nella VDA 5050 e facciamo parte del MassRobotics AMR Interoperability Working Group.
Inoltre, offriamo un’interfaccia aperta, che per sua natura può integrarsi con sistemi di gestione della flotta di terze parti. MiR fa parte del progetto: 5G-Robot – 5G Enabled Autonomous Mobile Robotic Systems, dove svolge un ruolo attivo nel progetto 5G-Robot, che è una collaborazione tra l’Università di Aalborg, MiR, Universal Robots, Intelligent Systems, Technicon, Telenor, Nokia e gli utenti finali industriali Novo Nordisk, Grundfos, Danfoss e LEGO. Il progetto è sostenuto dal Fondo Danese per l’Innovazione e mira ad abbassare le barriere per l’automazione dei processi con i robot. MiR fa parte di questo progetto per contribuire a ridurre la complessità delle implementazioni robotiche, consentendo ai propri robot mobili di lavorare in sistemi di gestione della flotta di terze parti.
Siamo sicuri che l’interoperabilità diventerà una componente sempre più importante dell’intralogistica, perché i clienti vogliono poter creare la loro soluzione di automazione ottimale e gestirla da un punto centrale: questi requisiti stanno ridisegnando lo scenario della robotica autonoma e porteranno a nuovi standard di automazione.
Davide Boaglio è Area Sales Manager Italia di Mobile Industrial Robots.

{kind=link}