

Pensa a un’autovettura come a un insieme di unità di controllo elettroniche (ECU) distribuite su tutta la lunghezza e l’ampiezza dell’auto e che comunicano tra loro utilizzando reti diverse. Quando si aggiunge un’elettronica automobilistica più avanzata in ambito V2X (vehicle-to-everything), guida automatizzata o altro o si incrementa il livello di elettrificazione del veicolo, il numero di ECU aumenta così come la quantità di dati scambiati.
L’architettura del dominio spiegata in modo semplice
In un’architettura a dominio, le ECU sono classificate in domini in base alla loro funzione, ma l’architettura a zone è un nuovo approccio che classifica le ECU in base alla loro posizione fisica all’interno del veicolo, sfruttando un gateway centrale per gestire la comunicazione. Questa vicinanza fisica riduce il cablaggio tra le ECU per risparmiare spazio e ridurre il peso del veicolo, migliorando al tempo stesso la velocità del processore.
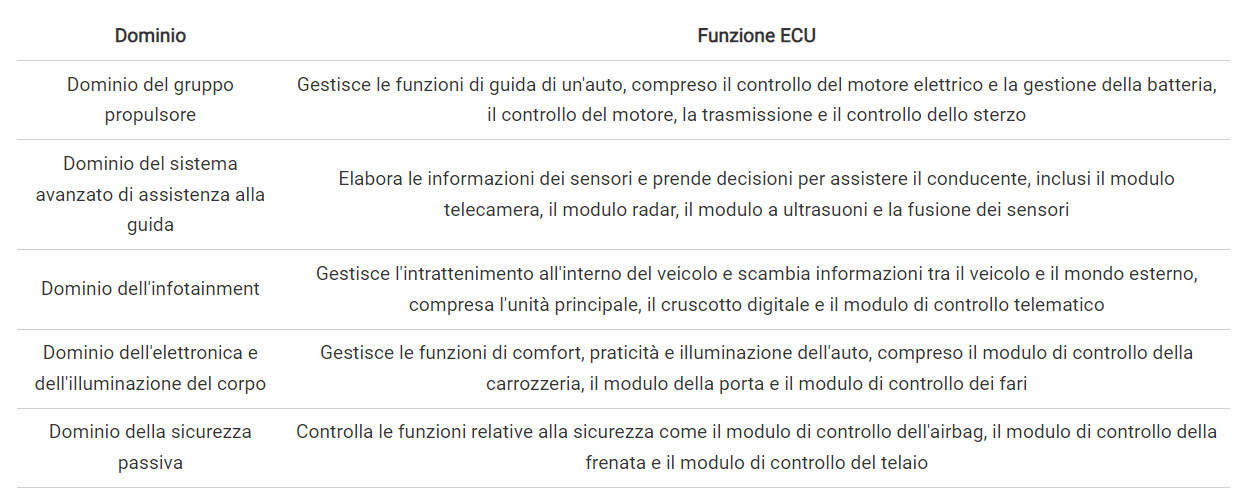
Per comprendere l’architettura dei domini, è utile iniziare comprendendo i cinque domini in cui le ECU sono generalmente classificate in base alla funzione, come mostrato nella Tabella 1.
Le ECU comunicano e scambiano dati su reti specifiche e rilevanti all’interno del proprio dominio, comunicando anche con ECU in domini esterni. Poiché la rete in un dominio potrebbe differire dalla rete di un altro dominio, un gateway funge da ponte.
La Figura 1 illustra un veicolo con un’architettura del veicolo basata su domini. In questa figura è presente un modulo gateway centrale collegato ai diversi domini dell’auto. Ogni dominio svolge diverse funzioni. Il controller di dominio, ad esempio l’unità di controllo del veicolo per il gruppo propulsore, include la funzione gateway. Questo gateway di dominio aiuta a comunicare i dati tra le ECU che supportano il dominio pertinente e dal dominio al resto del veicolo.
Il controller di dominio incorpora anche ECU, che aiutano a ridurre al minimo i costi di sistema integrando le funzionalità tipicamente implementate tramite più ECU. I processori Jacinto 7 di Texas Instruments integrano core Arm Cortex A-72 per la potenza di elaborazione grezza necessaria alla gestione dei dati, un Arm Cortex R-5F per il controllo in tempo reale e una rete gigabit time-sensitive (TSN) e uno switch Ethernet per reti ad alta velocità.

Presentazione dell’architettura a zone
Se l’auto fosse una stanza e le ECU fossero persone riunite in quella stanza per discutere diversi argomenti, un’architettura di dominio equivale a disporre in modo caotico quelle persone, facendole gridare agli altri nei loro gruppi di discussione dall’altra parte della stanza.
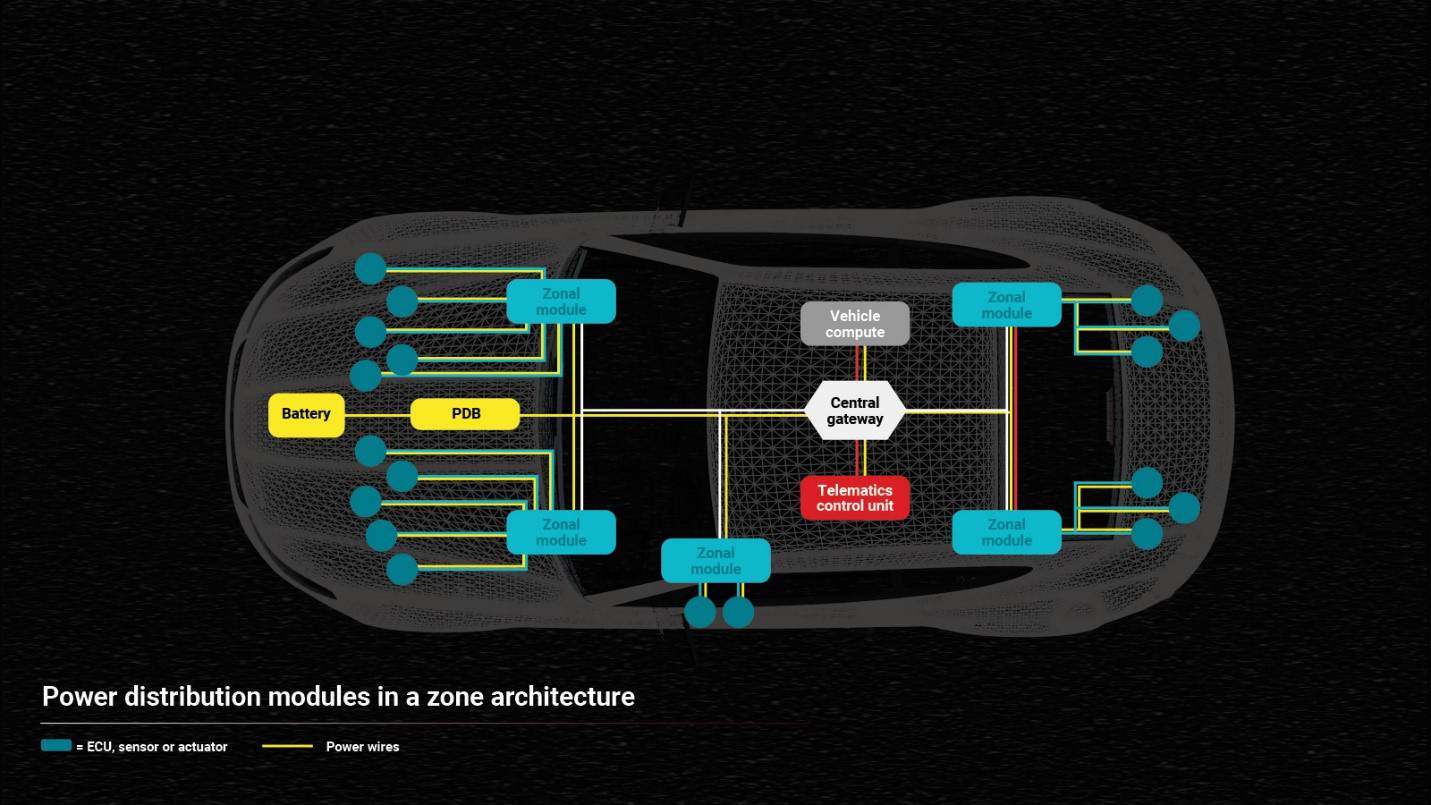
La Figura 2 mostra un’architettura a zona che organizza le ECU in base alla loro posizione all’interno dell’auto e aggiunge un modulo di calcolo. Il modulo di calcolo è un computer con un’ampia capacità di elaborazione per eseguire tutti i calcoli indipendentemente dalla funzione. La figura illustra anche i moduli zonali e i nodi marginali associati in diverse regioni dell’auto.
È possibile utilizzare una rete a larghezza di banda ridotta come la rete CAN (Controller Area Network) per la comunicazione tra i diversi moduli di zona e il gateway centrale/moduli di calcolo. Tuttavia, anche le reti ad alta velocità come Ethernet rappresentano una buona scelta perché forniscono elevata affidabilità e funzionamento regolare in una vasta gamma di temperature automobilistiche. E per l’elaborazione distribuita tra i moduli di elaborazione centrale e di zona, PCIe è una scelta di rete particolarmente adatta.
Vantaggi della distribuzione dell’energia di un’architettura a zone
Gli ingegneri stanno anche approfittando di questa riorganizzazione delle ECU per ottimizzare le architetture di distribuzione dell’energia, in particolare la riprogettazione delle scatole di giunzione intelligenti, che distribuiscono l’energia a diversi carichi ed ECU nel veicolo. Nello specifico, gli ingegneri stanno sostituendo relè e fusibili con soluzioni a semiconduttori.
In un’architettura a zone, le scatole di distribuzione dell’alimentazione sono collocate in modo che ciascuna zona disponga della propria unità di distribuzione dell’alimentazione per alimentare i moduli nella zona corrispondente. La Figura 2 mostra il concetto di distribuzione dell’alimentazione in un’architettura a zone, dove è possibile vedere l’integrazione della funzione di distribuzione dell’alimentazione di ciascuna zona con il modulo di zona che gestisce anche il traffico di rete. La nuova architettura di distribuzione della potenza porterà a una riduzione del peso dei cavi, con conseguente maggiore efficienza del carburante per i veicoli con motore a combustione interna e maggiore autonomia per i veicoli elettrici alimentati a batteria.
La transizione dalle architetture di dominio a quelle di zona: architetture crossover in soccorso
La transizione completa dall’attuale architettura di dominio alle nuove architetture di zona è un’impresa enorme. Non solo devono essere progettati nuovi moduli zonali, ma anche il software, nella maggior parte dei casi, deve essere riprogettato e riconfigurato per supportare la nuova architettura. Inoltre, la sostituzione dei fusibili e la riprogettazione dell’intero cablaggio del veicolo devono essere accuratamente verificati e convalidati. Tutto questo per dire che verranno migrate le architetture dei veicoli che probabilmente saranno architetture crossover.
La Figura 3 mostra le architetture crossover che sono un incrocio tra l’architettura di dominio esistente e le nuove architetture di zona. Queste architetture manterranno i domini e i corrispondenti nodi edge. Il calcolo centrale nelle architetture a zone sarà probabilmente suddiviso in moduli di calcolo ADAS, IVI e VCU, con nodi edge specifici del dominio che comunicano direttamente con il corrispondente modulo di calcolo centrale. I moduli zonali nel crossover molto probabilmente si concentreranno sulla distribuzione dell’energia e saranno molto meno dei gateway per tutti i nodi periferici della zona. Cioè, un modulo zonale assomiglierà molto di più a un tradizionale modulo di controllo della carrozzeria (BCM), tranne per il fatto che ce ne saranno di più nell’auto.

Conclusione
Con l’aumento del numero di ECU, l’architettura del veicolo si è evoluta in un’architettura di dominio in cui le ECU sono raggruppate in base a una funzione correlata eseguita da ciascuna ECU. Tuttavia, ciò ha aumentato la complessità sia della rete che della distribuzione dell’energia. I progettisti di veicoli automobilistici stanno ora pianificando veicoli basati su architettura a zone, con i veicoli di prima generazione che sono architetture crossover, per ottimizzare sia la distribuzione dei dati che quella dell’energia. La nuova architettura di zone porterà infine a una riduzione del peso dei cavi, che si tradurrà in una maggiore efficienza del carburante per i veicoli con motore a combustione interna e in una maggiore autonomia per i veicoli elettrici alimentati a batteria.
Ulteriori informazioni si questo argomento sono contenute nel whitepaper “Come un’architettura a zone apre la strada a un veicolo completamente definito dal software.”
Arun T. Vemuri è stato General Manager Automotive Body Electronics & Lighting presso Texas Instruments.

{kind=link}