
Se state progettando un’applicazione di azionamento di un motore, probabilmente avete fatto affidamento su più componenti discreti come i transistor a giunzione bipolare (BJT) per implementare il controllo del motore. Sebbene questo approccio sia in genere meno costoso, esso può aumentare il numero complessivo dei componenti e lo spazio sulla scheda, nonché i tempi e la complessità della progettazione. Anche l’utilizzo di un maggior numero di componenti può influire sull’affidabilità del sistema.
L’integrazione diventa fondamentale man mano che le applicazioni diventano più complesse, più potenti e più piccole. Le soluzioni integrate possono abbreviare i tempi di progettazione e ridurre la complessità e i costi di approvvigionamento, garantendo al tempo stesso un sistema motore affidabile ed efficiente.
In questo articolo confronterò diverse implementazioni di controllo motore, da opzioni discrete a opzioni completamente integrate, per aiutarvi a trovare l’approccio giusto per il vostro progetto. La tabella 1 confronta i livelli di integrazione in ciascuna opzione di controllo motore.

Tabella 1: Livelli di integrazione per azionare un motore.
Approcci discreti al controllo motore
La Figura 1 illustra un’unità di controllo con un microcontrollore (MCU) che elabora il feedback sullo stato del motore e invia segnali per regolare la coppia, la posizione e la velocità del motore. Il gate driver amplifica il segnale dell’MCU per pilotare il MOSFET di potenza che controlla il motore.

Figura 1: diagramma a blocchi di controllo motore di base.
È possibile utilizzare i circuiti totem-pole/push-pull BJT come circuiti gate-drive per pilotare un singolo MOSFET, come mostrato nella Figura 2. Anche se economico e facile da implementare, un circuito totem-pole BJT ha un numero elevato di componenti e occupa molto spazio a bordo. Inoltre, è necessario replicare questo circuito discreto perché sono necessari più MOSFET per azionare un motore, il che moltiplica il numero di componenti e lo spazio richiesto sulla scheda.
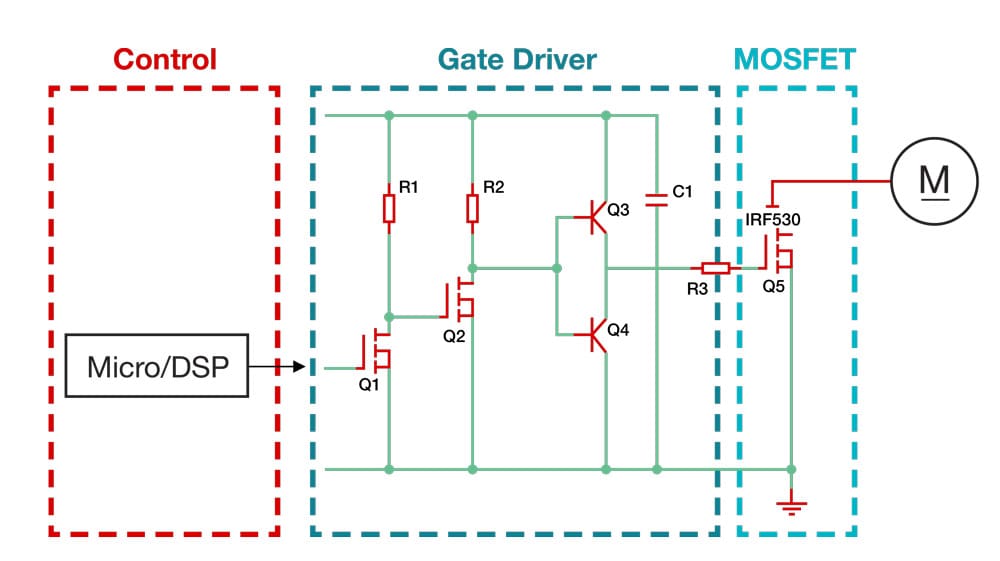
Figura 2: Implementazione del blocco gate-driver con un circuito totem-pole/push-pull BJT discreto.
Prima opzione integrata: circuiti integrati gate-driver
Un IC gate-driver di base integra la funzionalità del totem in un unico package. Le recenti innovazioni della tecnologia di processo hanno reso i circuiti integrati gate-driver convenienti quanto un BJT basato su discreti.
Ci sono diverse considerazioni da fare quando si sceglie un IC gate driver, come il numero di canali e le capacità di tensione e corrente più adatte ai livelli di potenza di un motore, come mostrato nella Figura 3.
I circuiti integrati gate driver integrati includono:
- I gate driver a un canale, come UCC21732 di TI, sono tipicamente presenti nei motori AC che pilotano interruttori di potenza ad alta tensione (>700 V) lato alto e basso come transistor bipolari a gate isolato (IGBT) e carburo di silicio (SiC)
- Gate driver a mezzo ponte a due canali come UCC27712 per motori da 100 a 700 V per pilotare IGBT e MOSFET
- Driver a ponte H a quattro canali e driver di gate motori trifase a sei canali come DRV8329, progettati per motori DC MOSFET a bassa tensione (<60 V).
Man mano che i livelli di potenza dei motori cambiano, l’utilizzo dei gate driver consente di mantenere il progetto precedente modificando solo i MOSFET esterni per adattarsi ai nuovi livelli di tensione e corrente.
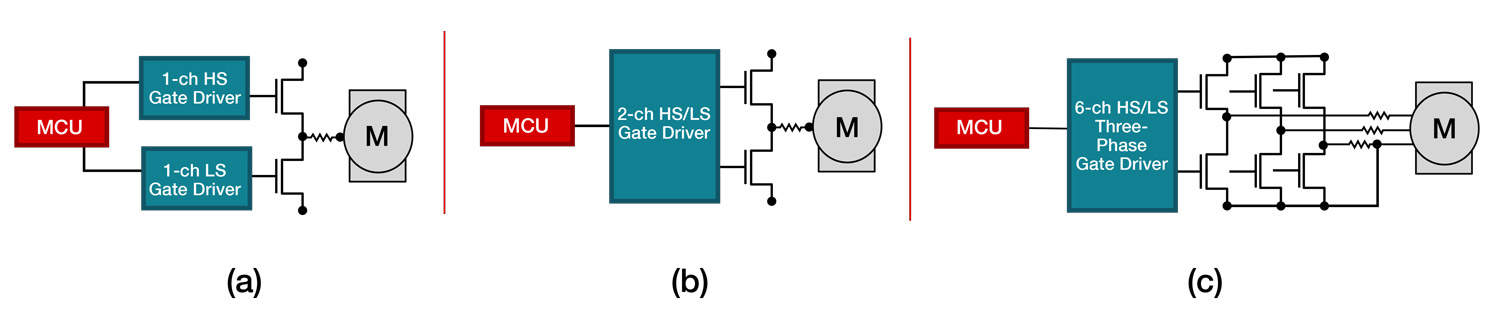
Figura 3: Tipi di circuiti integrati gate driver che pilotano MOSFET esterni.
I gate driver spaziano da funzionalità di base, come il blocco di sottotensione e la protezione di interblocco per impedire la conduzione incrociata, a funzionalità avanzate, come l’azionamento intelligente del gate per il controllo dello slew-rate e del dead time. Approfondimenti su questo argomento sono contenuti nell’application note “Understanding Smart Gate Drive.” I componenti esterni impostano tradizionalmente lo slew-rate a velocità di variazione: due resistori di source e sink per limitare la corrente al gate del MOSFET, un diodo per regolare individualmente le velocità di salita e discesa e un resistore di pull-down. L’azionamento Smart Gate elimina questi componenti, offrendo al contempo la flessibilità di regolare lo slew-rate tramite l’interfaccia seriale SPI
L’utilizzo di un driver a sei canali con smart gate drive elimina fino a 24 componenti discreti, risparmiando spazio sulla scheda e la distinta base (BOM). Altre funzionalità di protezione e diagnostica integrate nei gate driver includono il rilevamento della corrente, la protezione da sovracorrente e sovratemperatura, il rilevamento dei guasti e persino l’isolamento, che riduce ulteriormente il numero dei componenti.
Seconda opzione integrata: un circuito integrato per il pilotaggio del motore
Un IC di pilotaggio del motore, che include un gate driver e MOSFET di potenza, è adatto per i sistemi motore a bassa potenza (<70 W), come mostrato in Figura 4. I circuiti integrati di pilotaggio del motore presentano un ingombro ridotto rispetto ai gate driver; l’integrazione dello stadio di potenza MOSFET semplifica lo schema di progettazione e il layout. Come i circuiti integrati gate-driver, anche i circuiti di pilotaggio motore come il DRV8962, integrano funzionalità di protezione e diagnostica.
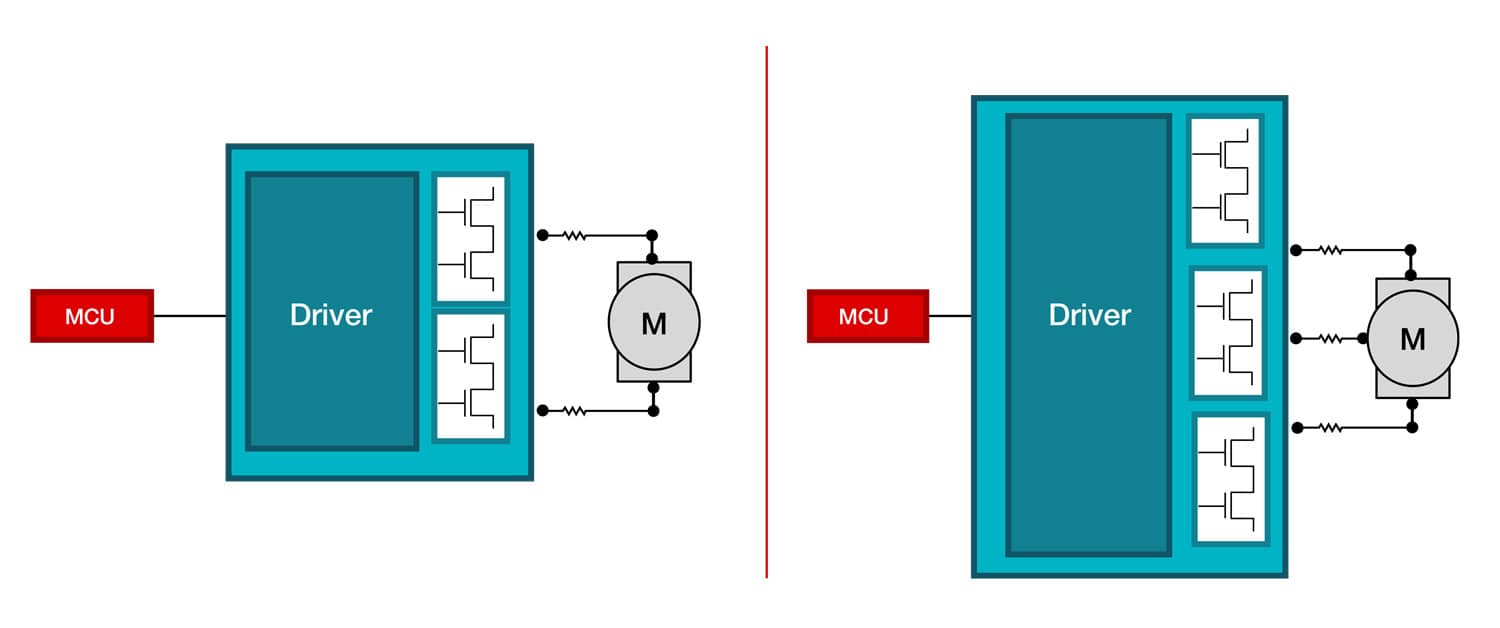
Figura 4: Ponte H e driver per motori trifase con FET integrati.
Quando si seleziona una soluzione di azionamento per controllo motore, è necessario considerare la RDS(ON) dei MOSFET interni, nonché la corrente di picco e il valore medio (RMS). La dissipazione di potenza dei MOSFET interni rende inoltre necessario eseguire calcoli termici.
Terza opzione integrata: IC gate driver con controllo integrato
A differenza delle prime due opzioni, i gate driver con controllo integrati come DRV8329 non richiedono un MCU per il controllo del motore. Questi circuiti integrati dispongono di funzionalità gate driver con protezione e diagnostica, incorporando al tempo stesso algoritmi di controllo senza assistenza MCU, come mostrato nella Figura 5.
L’implementazione degli algoritmi di commutazione del motore – siano essi di controllo trapezoidale, sinusoidale o ad orientamento di campo – può essere complessa. I circuiti gate driver con controllo integrato forniscono una soluzione priva di codice che gestisce internamente l’algoritmo di commutazione, consentendo di ridurre i tempi di progettazione e semplificare la complessità di codifica, debug e test.
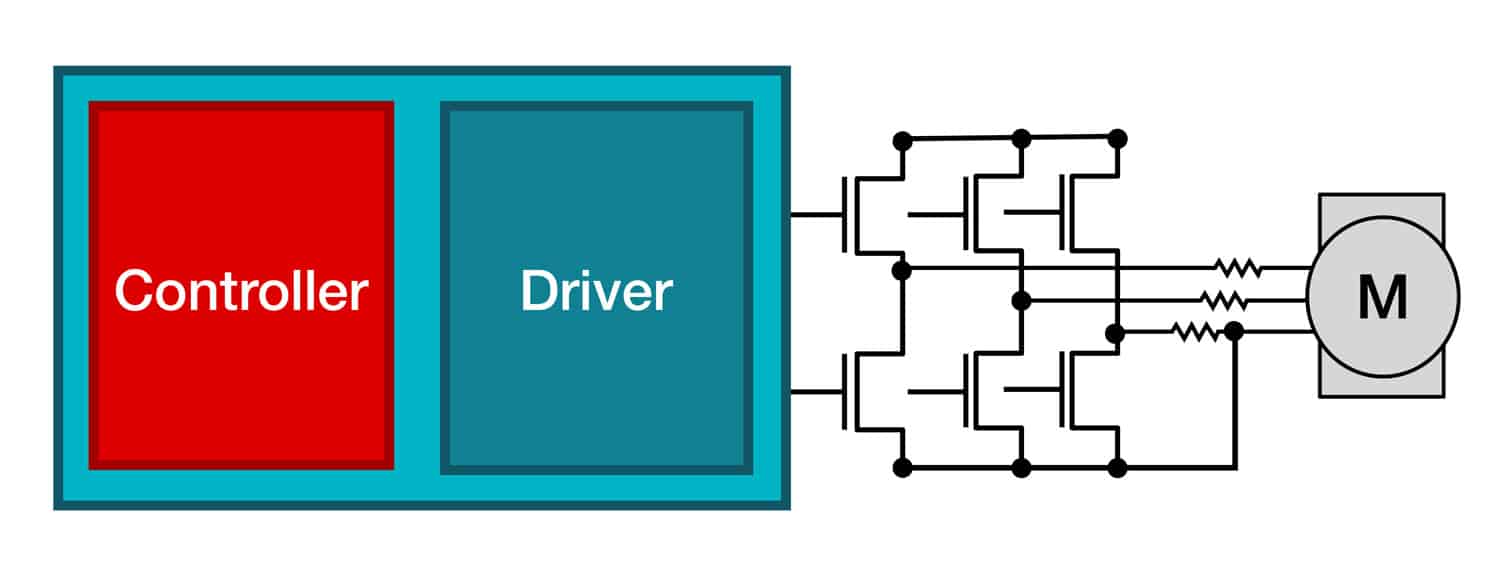
Figura 5: un gate driver trifase con controllo integrato.
I gate driver con controllo integrato forniscono inoltre flessibilità nell’implementazione della commutazione del motore con controllo sensored o sensorless. Un approccio basato su sensori consente l’uso di dispositivi esterni ad effetto Hall per rilevare la posizione del rotore; questi circuiti integrati possono accettare gli ingressi dei sensori ad effetto Hall e sfruttare un algoritmo di controllo per azionare il motore in modo efficiente e silenzioso. Al contrario, un’implementazione sensorless non impiega i sensori ad effetto Hall esterni per ridurre lo spazio sulla scheda e la distinta base. Un IC di questo tipo prevede la misurazione delle tensioni di forza controelettromotrice (back-EMF) attraverso il rilevamento di corrente integrato per calcolare internamente la posizione del motore.
Quarta opzione integrata: controllo integrato, gate driver e circuiti integrati MOSFET
L’opzione integrata finale è spesso chiamata “integrazione completa”, come mostrato nella Figura 6. Un circuito integrato con controllo, gate driver e MOSFET come MCF8315A occupa una quantità minima di spazio sulla scheda e ha la distinta base più ridotta, integrando il controllo senza codice, funzionalità, un driver con funzioni di protezione e diagnostica e MOSFET di potenza, il tutto all’interno di un unico chip. Analogamente all’opzione IC del driver motore, le soluzioni di controllo integrato, gate driver e IC con MOSFET di potenza sono limitate dalle capacità dei MOSFET interni, quindi sono necessari calcoli di corrente e termici.
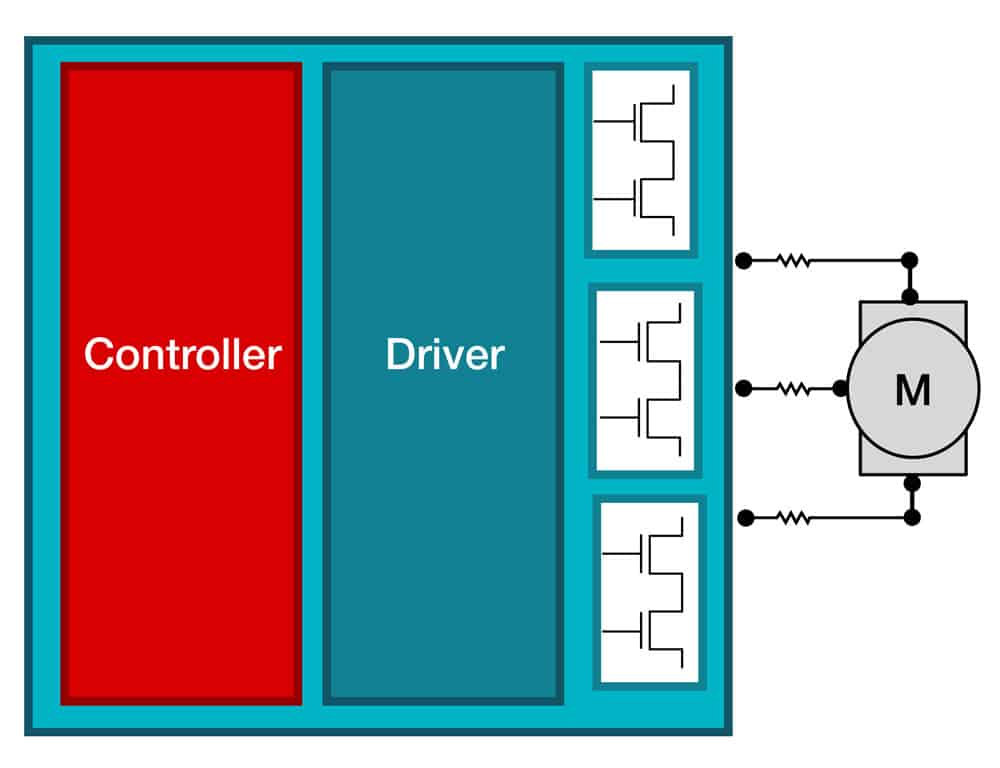
Figura 6: Completamente integrato: controllo motore più driver più MOSFET.
Conclusione
Non solo esistono diversi livelli di integrazione per soddisfare i requisiti di potenza del motore, ma queste soluzioni possono anche semplificare i tempi, i costi e la complessità della progettazione. I dispositivi integrati possono anche affrontare sfide come il rumore udibile negli elettrodomestici e il controllo di precisione nell’automazione industriale e nella robotica.
Kathrina Macalanda ha ricoperto il ruolo di Product Marketing and Applications Engineering in Texas Instruments.

{kind=link}