

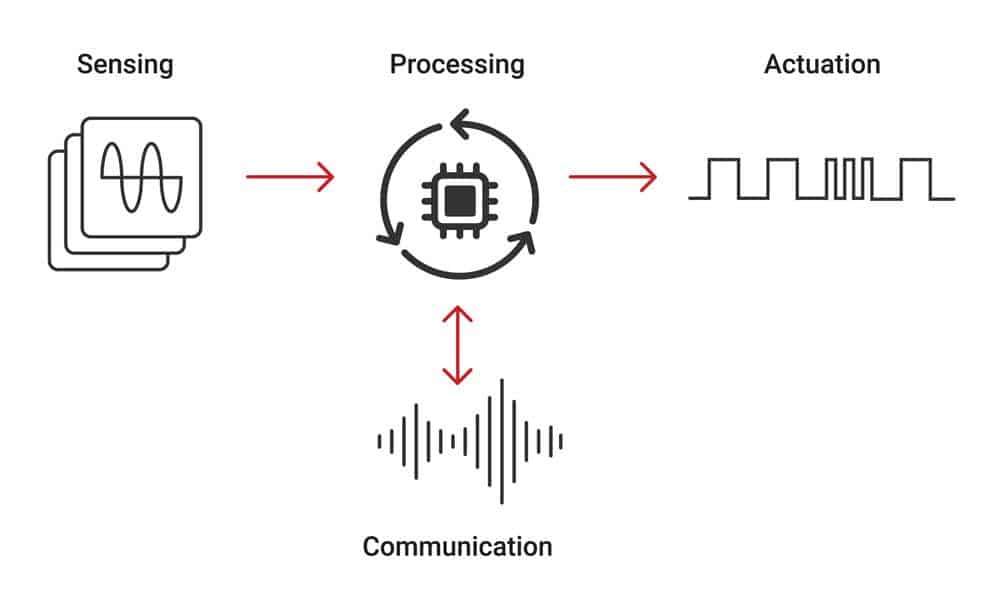
In un altro articolo dedicato ai controlli in tempo reale ci siamo concentrati sul blocco funzionale di rilevamento della catena del segnale di controllo in tempo reale (Figura 1). È facile fraintendere il secondo blocco funzionale, l’elaborazione, e presumere che sia legato solo alla frequenza dell’unità di elaborazione centrale (CPU) o ai milioni di istruzioni al secondo (MIPS) del core, concentrandosi esclusivamente sul crunch dei dati. In questo articolo dimostrerò il valore dell’elaborazione attraverso la lente dei sistemi di alimentazione ad alte prestazioni e dissiperò qualsiasi idea sbagliata sul ruolo dell’elaborazione nei sistemi di controllo in tempo reale.
Il crescente utilizzo dell’energia, in particolare nelle infrastrutture di rete e nelle applicazioni di erogazione di energia, richiede sistemi di alimentazione efficienti, compatti e stabili. Questo requisito ha dato origine a un’evoluzione nei sistemi di conversione di potenza per fornire un’elevata efficienza energetica, una rapida risposta ai transitori e un’elevata densità di potenza con una maggiore capacità di potenza.
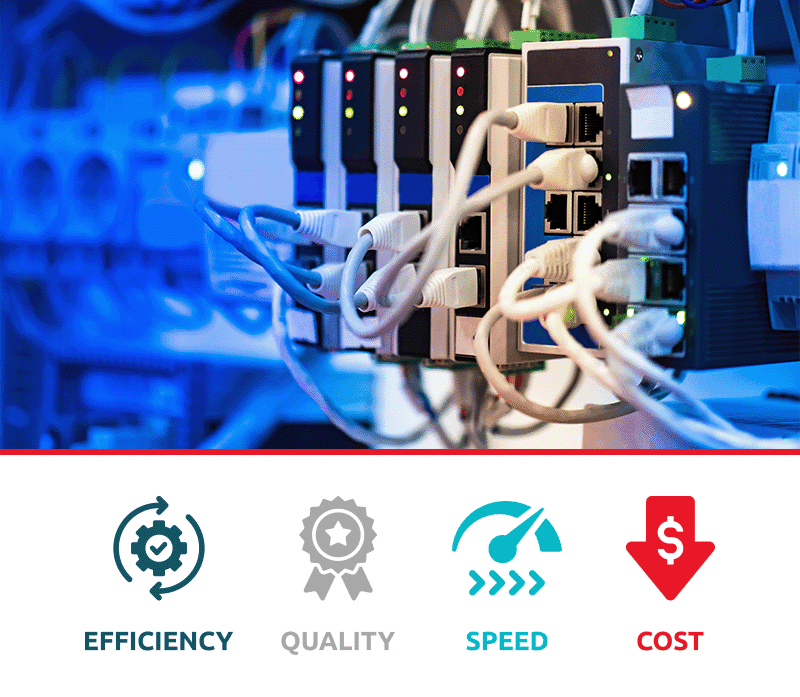
Elevata efficienza energetica
Come mostrato nella Figura 2, i gruppi di continuità nei data center devono funzionare senza interruzioni. I miglioramenti nell’efficienza, come discusso nel white paper, ” Achieve Power-Dense and Efficient Digital Power Systems by Combining TI GaN FETs and C2000 Real-Time MCUs“, possono rapidamente portare notevoli risparmi economici, una riduzione delle dimensioni della soluzione attraverso dissipatori di calore più piccoli e minori emissioni di gas a effetto serra. Può essere difficile, tuttavia, implementare topologie di alimentazione complesse come la correzione del fattore di potenza senza ponte totem-pole (che utilizza meno dispositivi di dissipazione) o controlli di commutazione graduale come la commutazione a tensione zero e la commutazione a corrente zero che sono necessari per ottenere questi benefici.
I microcontroller (MCU) in tempo reale ad alte prestazioni, alcuni anche con acceleratori hardware su chip, possono assicurare i loop di controllo più veloci per realizzare questo obiettivo. Per portare tutto ciò al livello successivo, gli MCU in tempo reale dotati di veloci convertitori analogico-digitale (ADC) su chip e capacità di post-elaborazione possono elaborare ulteriormente il campionamento rapido e accurato e la conversione di correnti e tensioni per ridurre la latenza della catena del segnale in tempo reale.
Una rapida risposta transitoria
Le applicazioni di potenza dei server richiedono un funzionamento stabile e affidabile in condizioni di carico variabili, per le quali è necessaria una risposta rapida ai transitori. Diversi schemi di controllo possono consentire tempi di risposta rapidi. Uno di questi schemi è dimostrato nel progetto di riferimento da 1 kW con CCM Totem-Pole PFC e LLC Current-Mode realizzato da C2000 e GaN, in cui l’obiettivo è dimostrare tempi di risposta rapidi (lo slew rate target è compreso tra 2,5 A/µS e 5 A/µS). Gli MCU in tempo reale rendono la latenza estremamente bassa tra rilevamento e attuazione, definendo un’elaborazione rapida con frequenza CPU/MIPS elevata, accesso rapido ai registri periferici, risposta veloce all’interruzione, set di istruzioni del codice di controllo ottimizzato, stretto accoppiamento hardware dei pilastri della catena del segnale in tempo reale e logica appositamente costruita (modulatori PWM e comparatori) all’esterno della CPU per la reattività di rilevamento di guasti in caso di undershoot o overshoot.
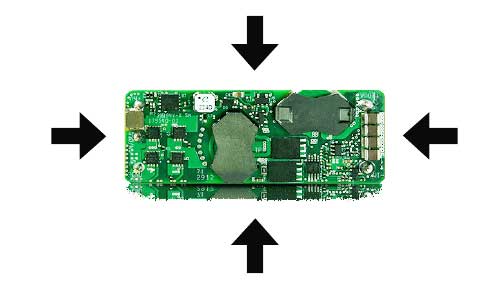
Elevata densità di potenza
La Figura 3 mostra i convertitori DC/DC spesso richiesti per soddisfare una maggiore capacità di alimentazione in uno spazio più piccolo, non solo per ridurre i costi di sistema ma anche per soddisfare gli standard normativi come quelli della Distributed-Power Open Standards Alliance. Con fattori di forma miniaturizzati, ridurre la dissipazione del calore senza dissipatori di calore diventa una sfida e l’adozione di dispositivi di alimentazione wide-bandgap come il nitruro di gallio e il carburo di silicio per consentire frequenze di commutazione più elevate e soddisfare queste piccole dimensioni di progettazione può essere ancora più ingombrante. Con la loro architettura intrinseca e gli acceleratori matematici su chip, la potenza di elaborazione degli MCU in tempo reale rende possibili calcoli complessi di dati critici in termini di tempo. La potenza extra fornisce capacità di calcolo aggiuntive, mettendo a disposizione più funzioni come la riduzione del rumore attivo e i filtri di interferenza elettromagnetica, evidenziati come una delle tante soluzioni nel white paper, “Understanding the Trade-offs and Technologies to Increase Power Density.” Inoltre, al di là dell’elemento di elaborazione principale, i moduli PWM e i comparatori personalizzati con caratteristiche quali alta risoluzione, blanking window, delayed trip, compensazione della pendenza per il controllo della modalità di corrente di picco e altri elementi funzionali come i blocchi logici configurabili, possono migliorare ulteriormente la potenza di calcolo.
In che modo gli MCU in tempo reale garantiscono la potenza di elaborazione necessaria?
Potenziare efficacemente i sistemi di alimentazione ad alte prestazioni di oggi è ciò che differenzia i controllori. Gli MCU in tempo reale di Texas Instruments offrono doppio accesso alla memoria, esecuzione deterministica a ciclo singolo, bus pipeline paralleli a otto fasi, superiore throughput di esecuzione della memoria, acceleratori efficienti e una mappa di memoria unificata. Alcuni di loro possiedono anche co-processori o supporto multicore per implementare in modo flessibile i sistemi di alimentazione, insieme a spazio per implementare sicurezza, diagnostica, algoritmi adattivi e attività di pulizia. Pee ulteriori approfondimenti è disponibile la nota applicativa “Real-Time Benchmarks Showcasing C2000 Control MCU’s Optimized Signal Chain.
Conclusione
Sebbene complessi algoritmi di controllo consentano sistemi di alimentazione con basso THD, alta densità di potenza ed efficienza e transitori veloci, l’effettiva implementazione richiede dal controller qualcosa di più della semplice funzionalità matematica e velocità più elevate. Poiché anche la temporizzazione, dal rilevamento all’attuazione, gioca un ruolo cruciale nella definizione delle prestazioni, gli MCU in tempo reale progettati appositamente per una latenza estremamente bassa con elevate prestazioni della CPU, PWM flessibili e rilevamento rapido e accurato possono oggi soddisfare le esigenze di sistema, insieme a soluzioni scalabili per il futuro.
Ulteriori informazioni sul blocco funzionale di attuazione del controllo in tempo reale sono disponibili nell’articolo “Sistemi di controllo motore in tempo reale: come ottenere un’attuazione efficiente, affidabile e precisa”.
È anche disponibile la “Guida di riferimento per il controllo in tempo reale“.
Meghana Manavazhi è Digital Application Engineer presso Texas Instruments.

{kind=link}