
Nelle applicazioni di azionamento del motore, è possibile monitorare e misurare la velocità, la posizione, la coppia e lo stato del motore in tempo reale per avviare, accelerare o modulare la velocità dinamica o decelerare il sistema del motore. Allo stesso modo, nelle apparecchiature di test per semiconduttori o batterie, è possibile utilizzare convertitori da digitale ad analogico per inviare segnali analogici accurati in un loop di controllo rapido, regolando la potenza di uscita di un’unità di alimentazione (PSU) basata su dispositivi di potenza al nitruro di gallio (GaN) in diverse condizioni di carico, o agendo sui gate driver che pilotano i MOSFET di potenza dei gruppi di continuità (UPS) che intervengono durante le interruzioni di corrente.
In tutti questi esempi, è molto importante modulare e regolare l’attuazione (per applicazioni come un azionamento motore, un’apparecchiatura di test della batteria o un’unità di alimentazione) per un sistema di controllo in tempo reale.
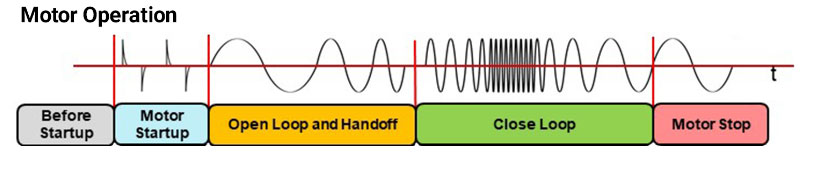
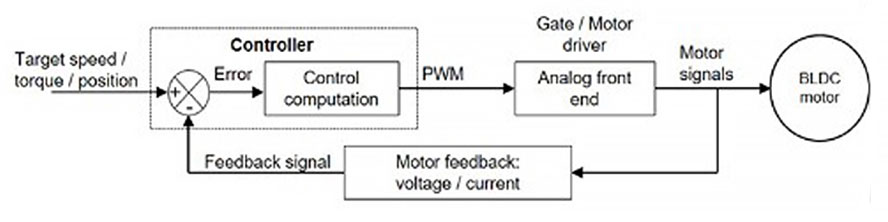
Durante il funzionamento del motore, possiamo identificare diverse fasi che aiutano a realizzare un’attuazione affidabile del motore. Queste fasi includono il pre-avviamento, l’avviamento motore, il funzionamento ad anello aperto, ad anello chiuso e l’arresto motore. Durante il funzionamento ad anello chiuso, il circuito fornisce un accurato feedback in tempo reale al sistema, poiché monitora costantemente diverse variabili e quindi si attiva in una modalità di risposta a circuito chiuso, come mostrato nella Figura 1.
Alta efficienza
La corsa all’elettrificazione ha portato alla nascita di vari standard di efficienza energetica, differenti per apparecchiature ed applicazioni: Energy Star, 80 Plus, ErP Lot 9 e altri. È necessario, pertanto, mantenere la massima efficienza nel sistema di controllo in tempo reale per consentire un minore consumo energetico e un adattamento del circuito durante i cambiamenti rapidi. Un sistema molto efficiente consente una risposta più rapida, un costo di proprietà inferiore e una maggiore durata.
Ad esempio, un robot aspirapolvere deve massimizzare la copertura del pavimento per ogni viaggio in base alla carica della batteria. Può farlo, la potenza di aspirazione deve essere regolata in tempo reale in funzione, ad esempio, del tipo di pavimento, dei detriti da aspirare e dell’ostruzione del sistema di aspirazione. Il driver che controlla il motore di aspirazione di tipo BLDC (senza spazzole) deve essere il più efficiente possibile per ridurre al minimo la dissipazione di potenza dovuta a perdite di commutazione, una resistenza RDSON troppo alta o per effetto dello slew rate del MOSFET. È possibile migliorare le prestazioni con tecniche come l’aumento della velocità di risposta, la diminuzione della frequenza di uscita della modulazione PWM; l’utilizzo di MOSFET con RDSON per pilotare il motore o l’utilizzo di diverse modalità di modulazione PWM come quella single-ended.
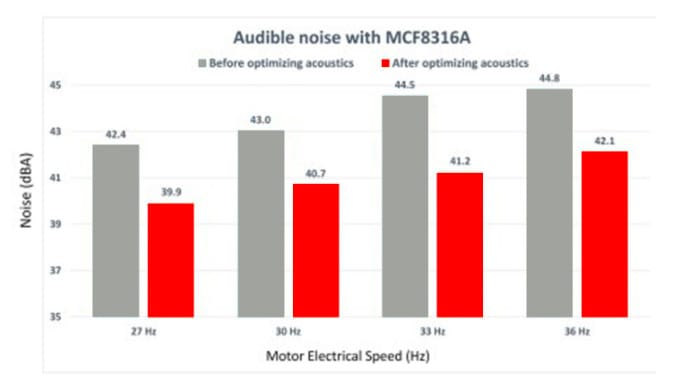
I consumatori che acquistano elettrodomestici danno la preferenza ai sistemi più silenziosi. I driver per motori BLDC consentono migliori prestazioni acustiche con tecniche di controllo come il controllo sinusoidale e, più recentemente, con il controllo a orientamento di campo (FOC), che consentono di ottenere la migliore efficienza del motore mantenendo i flussi a 90 gradi. Il driver motore BLDC sensorless MCF8316A a chip singolo senza codice di Texas Instruments consente ai progettisti di sistemi di ridurre al minimo il rumore udibile attraverso tecniche di controllo come la modulazione PWM continua, la compensazione del dead-time e con una modalità di commutazione variabile.
Affidabilità
I meccanismi di protezione del sistema di controllo in tempo reale garantiscono un funzionamento affidabile in ambienti difficili e imprevedibili, come temperature molto alte o molto basse, o dove fattori esterni potrebbero influenzare elettricamente o anche fisicamente il sistema. In un motore elettrico, la capacità di rilevare o prevedere il blocco del rotore può aiutare a ridurre al minimo la perdita di potenza, un guasto o il danneggiamento del dispositivo. Il driver MCF8316A di Texas Instruments, ad esempio, verifica continuamente le diverse condizioni di blocco motore durante il funzionamento e interviene immediatamente quando rileva un evento di blocco. Un esempio di situazione reale è quello di un robot aspirapolvere che rileva un oggetto come un panno che ne blocca il funzionamento. Il carico del sistema aumenta e il dispositivo rileva la condizione di blocco motore.
Il driver motore MCF8316 gestisce anche funzioni critiche, come il rilevamento di guasti del motore, e implementa meccanismi di protezione per rendere più affidabile la progettazione complessiva del sistema.
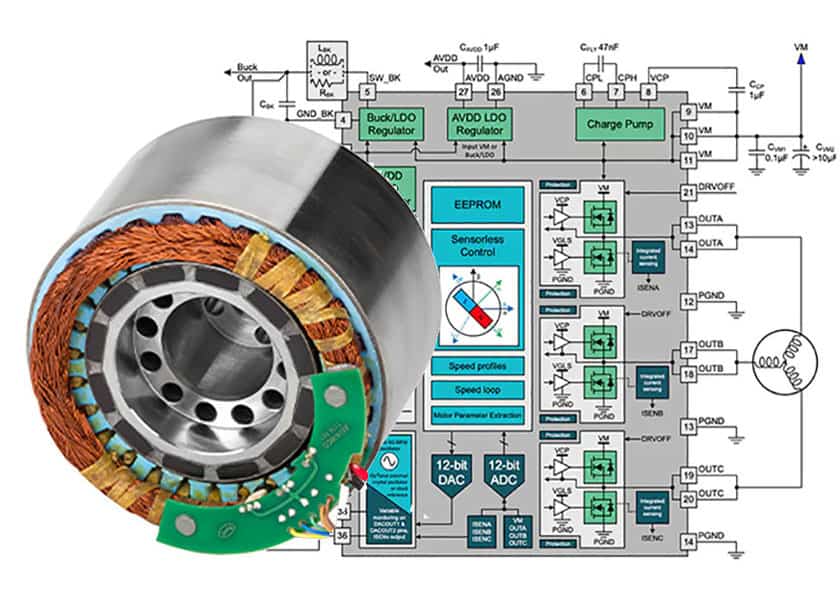
In Figura 3 è riportato uno schema a blocchi di un tipico sistema di controllo in tempo reale per motore BLDC in cui i resistori di rilevamento della tensione e della corrente forniscono costantemente feedback del motore al controller, che a sua volta invia diversi segnali PWM al driver per le azioni necessarie.
Precisione
La precisione del sistema di controllo in tempo reale è molto importante per un funzionamento affidabile. Un tipico sistema a circuito chiuso si basa sulla velocità di elaborazione dei driver motore per avere la massima precisione di velocità con una latenza minima. Inoltre, nei sistemi di controllo in tempo reale in cui è necessario fornire feedback ad anello chiuso, gli amplificatori di rilevamento della corrente forniscono i massimi livelli di precisione di rilevamento della corrente in un’ampia gamma di tensioni e temperature.
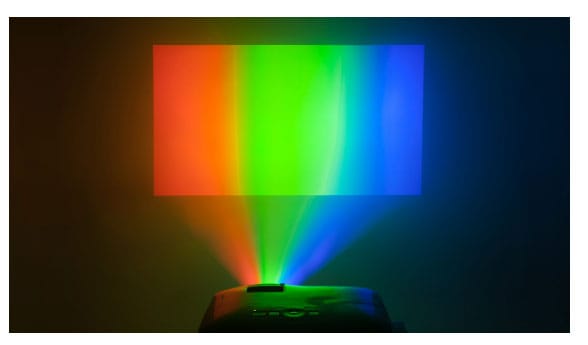
In applicazioni come i sistemi CPAP che creano una pressione positiva continua delle vie aeree (CPAP) per le persone che soffrono di apnea notturna, un accurato sistema di controllo in tempo reale monitora costantemente i blocchi d’aria e fornisce l’aria necessaria per aprire le vie aeree della persona. Un altro esempio sono le applicazioni del proiettore DLP che richiedono una precisione (1%) ad alta velocità per il sistema motore della ruota dei colori affinché il proiettore possa visualizzare immagini a colori di alta qualità sullo schermo in apparecchiature come i proiettori per home theater, come mostrato nella Figura 4.
Conclusione
La fase di attuazione di un sistema di controllo in tempo reale dipende dai diversi tipi di feedback che monitorano costantemente qualsiasi cambiamento delle condizioni del sistema, che vengono quindi inviati al controller che interpreta i dati e invia il successivo comando di attuazione. Al di là della capacità di ridurre al minimo il rumore udibile attraverso la compensazione dei tempi morti, i driver per motori BLDC svolgono un ruolo importante nell’attuazione di molte applicazioni industriali e automobilistiche fornendo anche funzionalità di rilevamento del blocco del motore o garantendo una precisa velocità.
Texas Instruments dispone di un ampio portafoglio di current-sense amplifiers, dispositivi al nitruro di gallio (GaN) e driver per motori Brushless DC (BLDC).
Charlie Munoz è Marketing and Applications Manager presso Texas Instruments.

{kind=link}